Om de targets sneller te laten lopen na een bepaalde speel-tijd, ga ik pwm gebruiken. Op het filpje hierboven zie je dat de cirkel geleidelijk aan trager gaat draaien, in mijn spel zou ik geen 256 snelheden doorlopen, maar een drietal. Zo zal het spel moeilijker worden naarmate je langer speelt.
Code gebruikt in het filmpje (doorloopt alle 256 waardes):
int delayTime = 50;Code voor de machine (geen geleidelijke overgang zoals hierboven, maar plots zal de band sneller draaien voor een extra moeilijkheidfactor):
for(int i = 0; i < 256; i++)
{
analogWrite(motorPin, i);
delay(delayTime);
}
for(int i = 255; i >= 0; i--)
{
analogWrite(motorPin, i);
delay(delayTime);
}
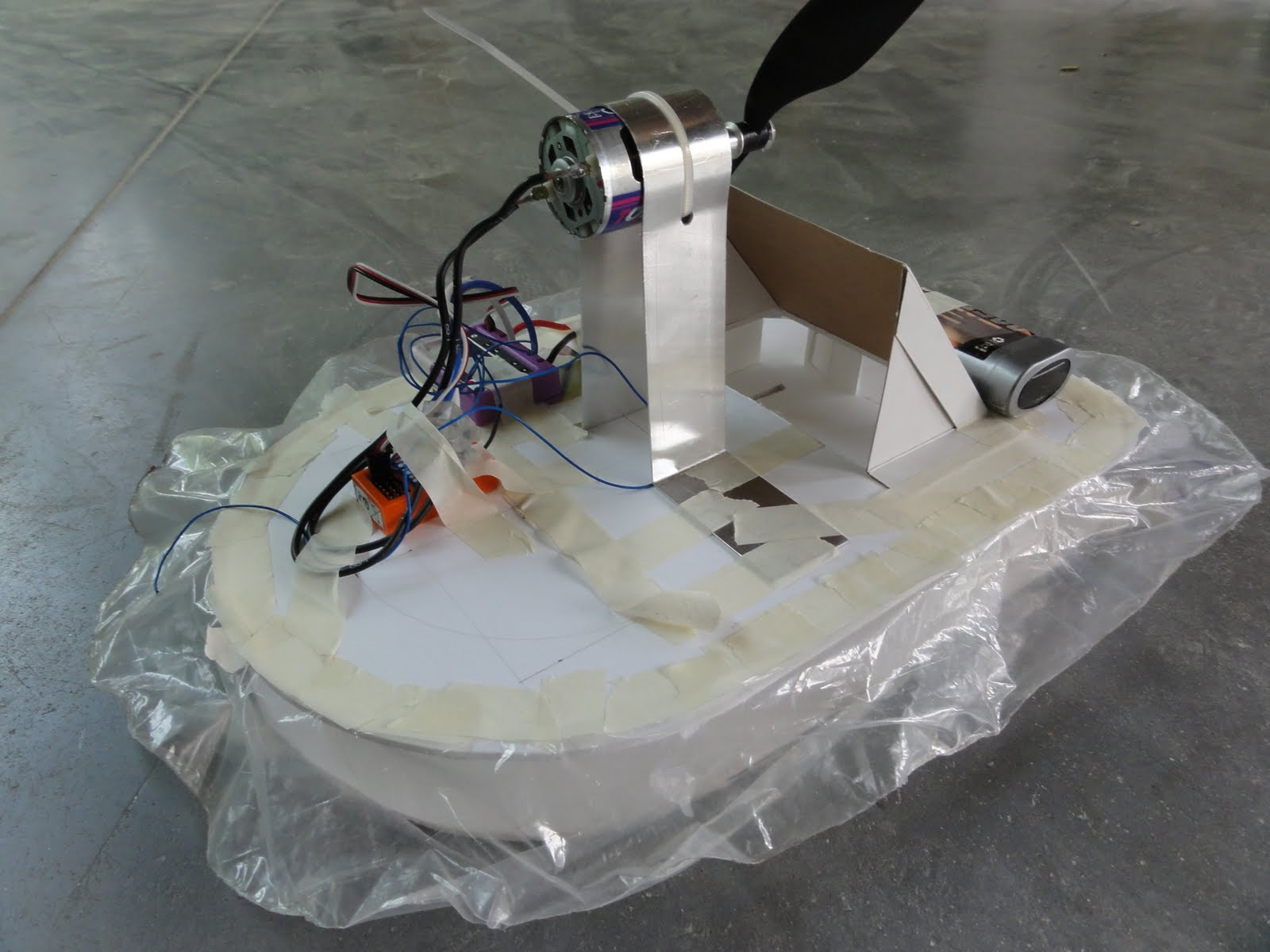
int beginSpeed = 150;Omdat ik de motorshield niet in gang kreeg, ben ik verder moeten gaan zonder lopende band.
int beginTime = 2500;
int eindSpeed = 200;
int eindTime = 10000;
analogWrite(motorPin, beginSpeed);
delay(beginTime);
analogWrite(motorPin, eindSpeed);
delay(eindTime);
Meer daarover in een volgende post, dan laad ik ook nog meer foto's en een Fruittellamachine 1.2...