Ondertussen hebben we al een stuk of 5 testmodellen gemaakt.
Eerst met apparte liftmotor, daarna met 2 motoren die zowel voor lift als voortstuwing moesten zorgen, en uiteindelijk met 1 motor.
De apparte liftmotor hebben we weggelaten omdat we geen deftig resultaat hadden.
Het was ook de bedoeling om die apart aan te sturen, wat een extra kanaal vroeg op de zender.
We hebben een 4 kanaals zender geleend, en dus hadden we 2 snelheidsregelaars nodig.
Een beetje te duur voor dit project, dus de liftmotor was vlug geschrapt.
We hebben een aantal verschillende propellors getest (5), en uiteindelijk blijken de goedkoopste nog het beste resultaat te geven.

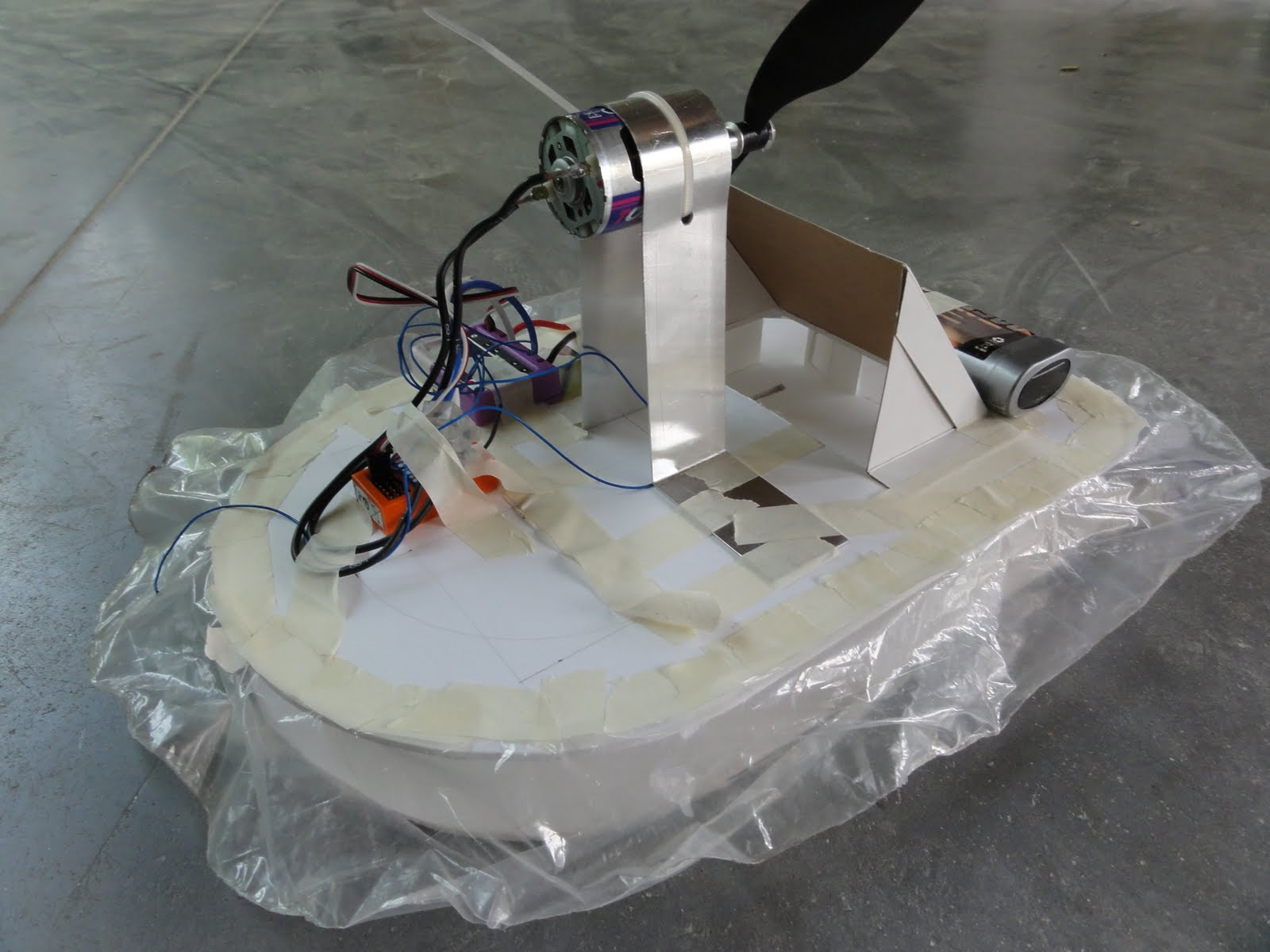
Onze eerste modellen hadden een gesloten rok, en luchtsleuven in de bodemplaat.
Vanaf onze derde test zijn we naar een open rok (en gesloten bodem dus) overgeschakeld.
Eerst kregen we veel te weinig lift, maar dat bleek aan de veel te kleine rok te liggen.
Het oorspronkelijke idee om 2 propellors te gebruiken voor voortstuwing werd ook afgevoerd omdat het niet makkelijk is om het verschil in stuwkracht te compenseren. De hover trekt scheef, door verschil in toerental tussen de 2 motoren. De afwijking was te groot om deze weg te werken door te corrigeren met de stuurflappen.
Het model van onze hover werd ook aangepast t.o.v. onze maquettes.
De eerste versie van het nieuwe model bestond uit 2 x 1 plaat van 1mm en 1 plaat van 2mm PS.
Dit was een behoorlijk gewicht, wat we uiteindelijk beter vermijden.
Daarom werden de platen opnieuw gelazerd, nu in 2x 1mm PS en 2x 3mm kadapack.
Een body voor de hover hebben we nog niet, omdat er geen foam meer beschikbaar was
op het moment dat we er wilden aan beginnen.
Hopelijk kunnen we deze in de komende dagen nog frezen...
Foto's en nog een verdere update zijn voor morgen of overmorgen.
Nog veel werk te doen voor de race van 1/06!











 op de foto links zie je mn eerste rubsband: kunststofplaatjes gekleefd op een rekbaar materiaal. Op de breedte van de plaatjes kan ik dan targets bevestigen die scharnieren naar achter als ze geraakt zijn.
op de foto links zie je mn eerste rubsband: kunststofplaatjes gekleefd op een rekbaar materiaal. Op de breedte van de plaatjes kan ik dan targets bevestigen die scharnieren naar achter als ze geraakt zijn.

 Nu heeft de motor zo'n danig hoog toerental dat hij het tandwiel dat je hier ziet uitsteken altijd losdraait. zoals hierboven al gezegd: geen enkel lijm houdt.
Nu heeft de motor zo'n danig hoog toerental dat hij het tandwiel dat je hier ziet uitsteken altijd losdraait. zoals hierboven al gezegd: geen enkel lijm houdt.












